



Описание
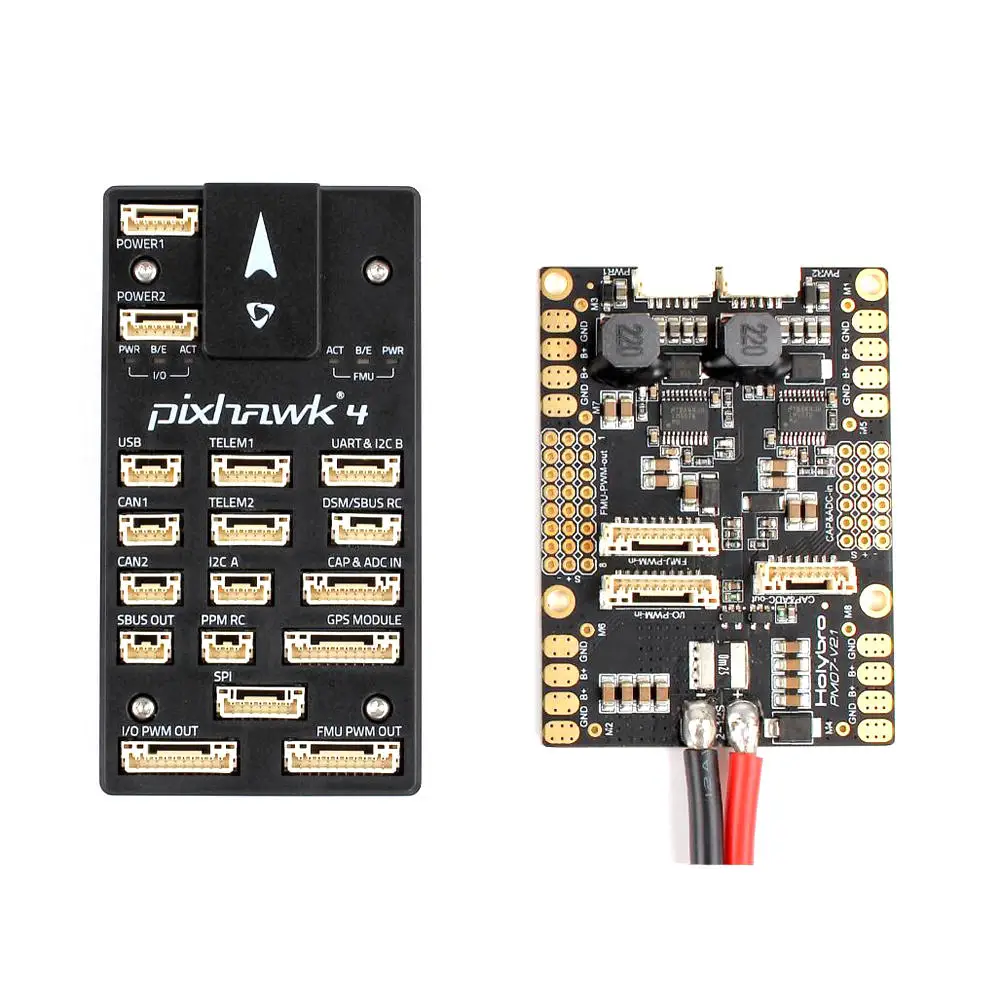
Holybro Pixhawk 4 Контроллер полета STM32F765 32 бит ARM w/PM07 управление питанием 5 V UBEC выход-пластиковый чехол
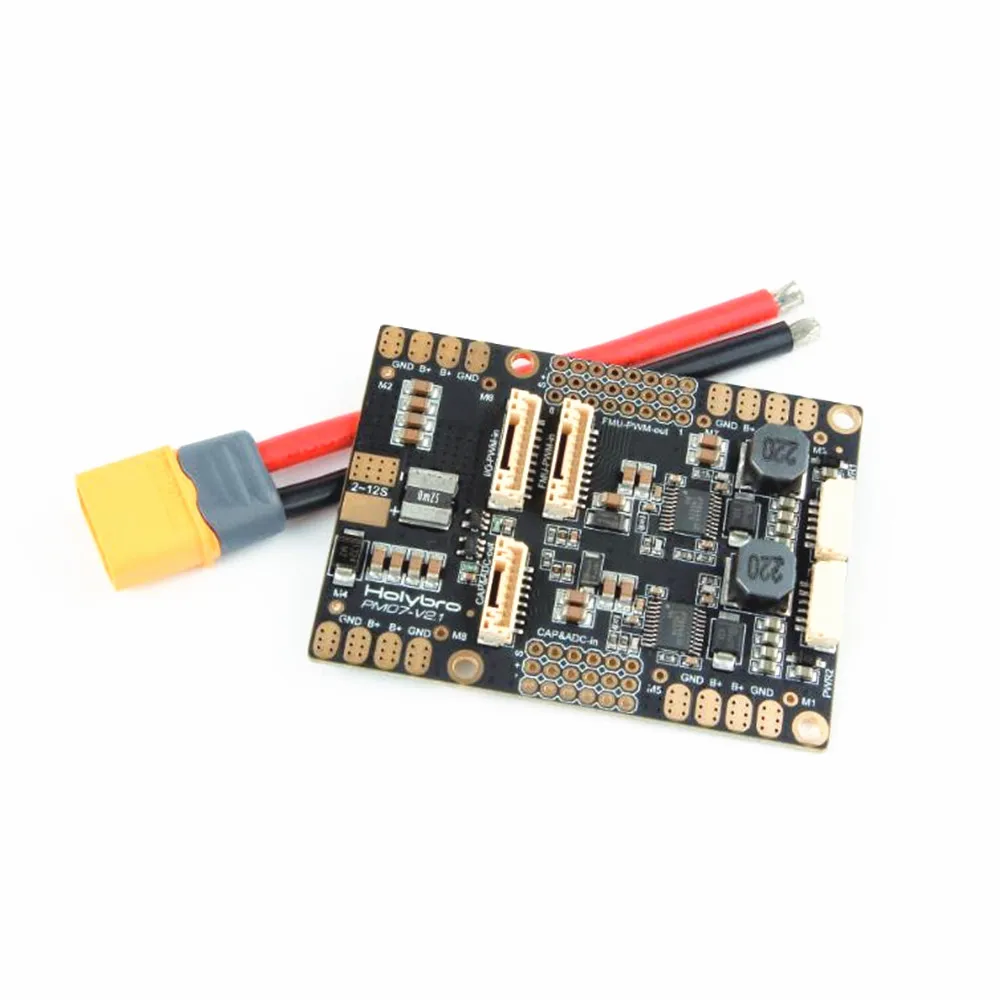
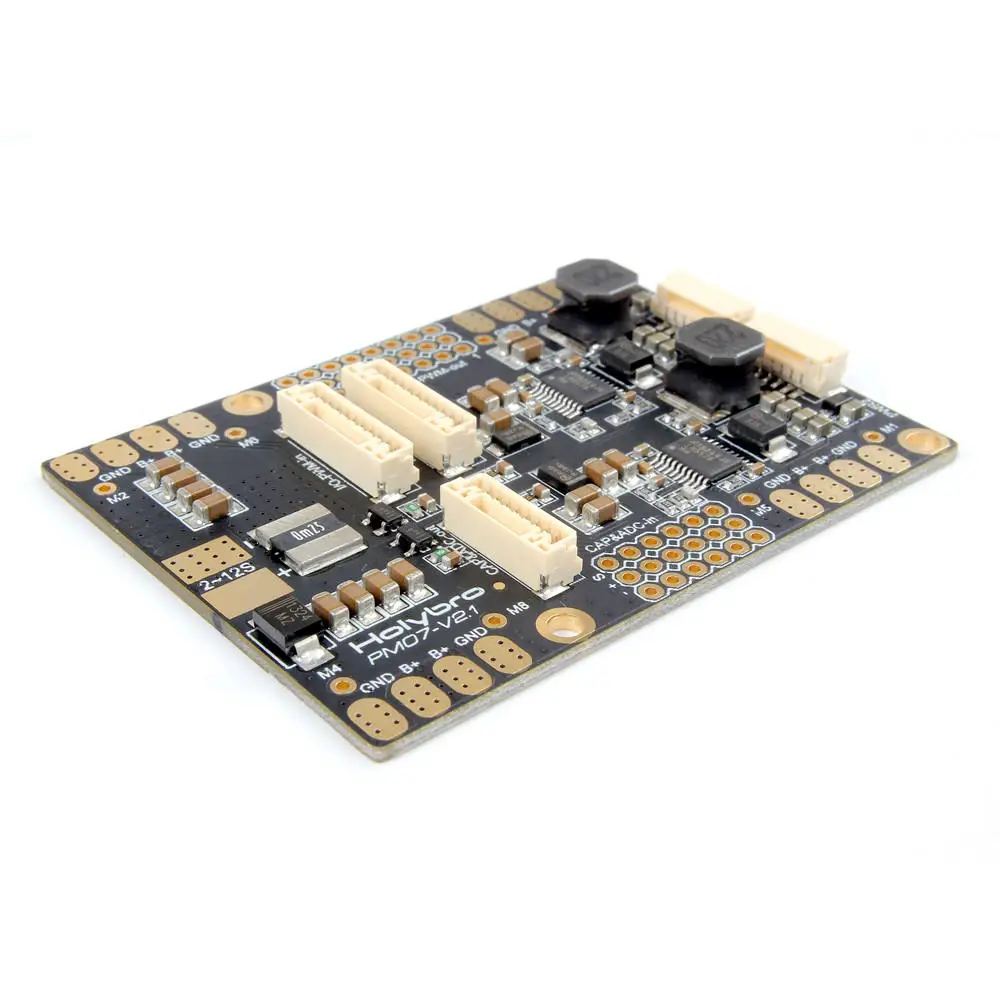
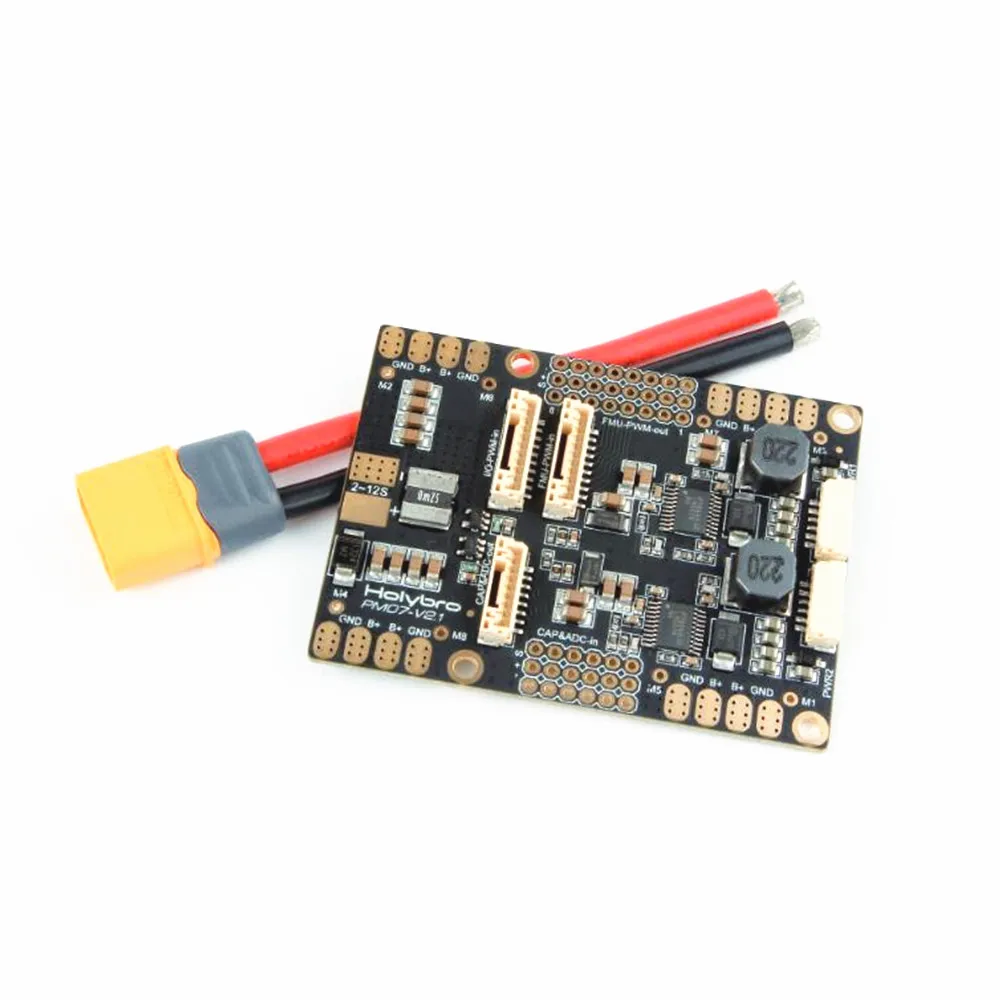
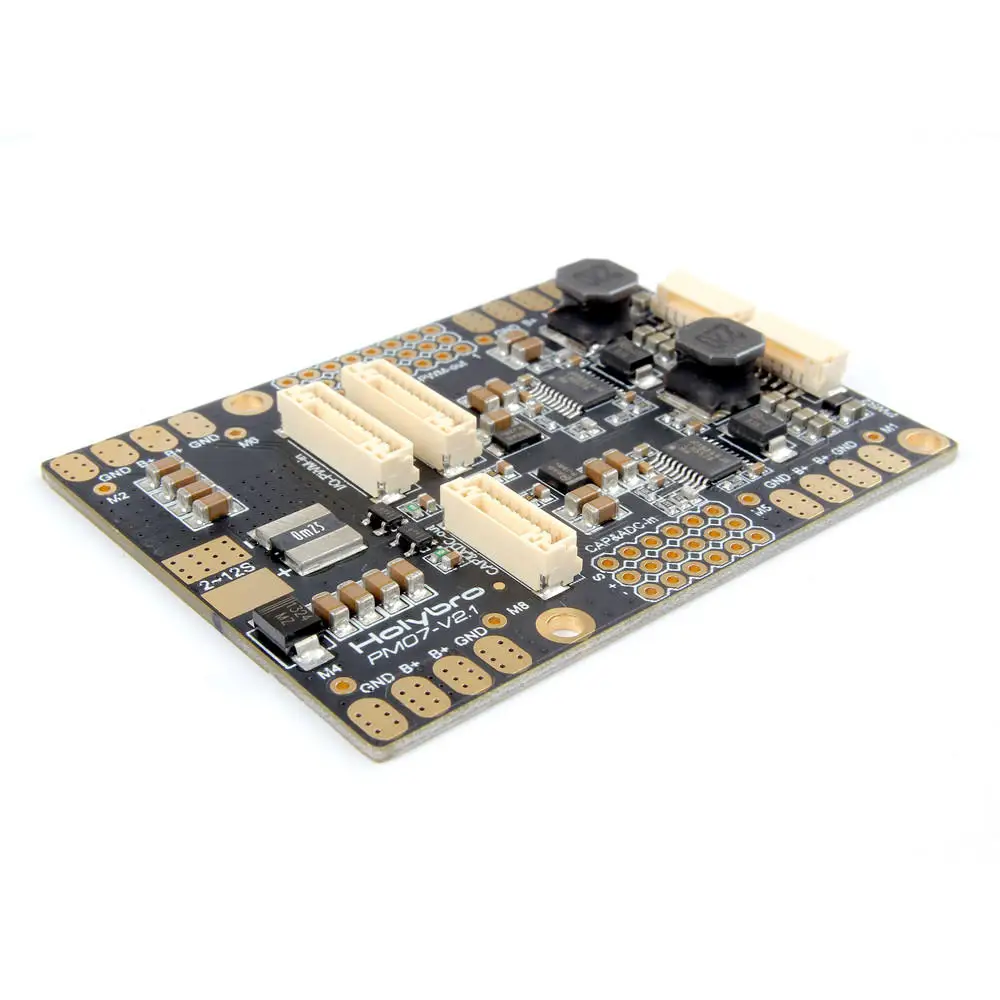
Характеристики продукта, новый и небольшой форм-фактор, больше вычислительной мощности и 2 раза оперативной памяти, чем предыдущая версия, новые датчики с более высокой стабильностью температуры, интегрированная изоляция вибраций, повышенная Простота в использовании: предустановленный с самым свежим PX4 (v1.7), Дополнительные порты для лучшей интеграции и расширенияPixhawk 4-это последнее обновление для успешного поколения контроллеров полета Pixhawk. Он разработан и разработан в сотрудничестве с Holybro и командой PX4, оптимизирован для запуска полного стека Dronecode и поставляется с предустановленной последней прошивкой PX4 (v1.7).Он оснащен в настоящее время самой передовой процессорной технологией от ST Microelectronics, сенсорной технологией от Bosch, InvenSense и операционной системой NuttX в реальном времени, обеспечивая невероятную производительность, гибкость, и надежность для управления любым автономным транспортным средством.Микроконтроллер Pixwhawk 4 теперь имеет 2 Мб флэш-памяти и 512кб оперативной памяти. С увеличенной мощностью и объемом оперативной памяти разработчики могут быть более производительными и эффективными в своей работе по разработке. На автопилоте могут быть осуществлены более сложные Алгоритмы и модели.Высокопроизводительные, малошумные IMUs на плате предназначены для приложений стабилизации. Готовые к обработке данные сигналы от всех датчиков направляются для разделения штифтов прерывания и таймера на автопилоте, что позволяет точно штамповать данные датчика по времени. Новый дизайн виброизоляций обеспечивает более точные показания, что позволяет транспортным средствам достигать более высоких результатов полета в целом.Две внешние шины SPI и шесть связанных отобранных чипов позволяют добавить дополнительные датчики и совместимую с SPI нагрузку. В общей сложности четыре шины iec, две предназначены для внешнего использования и две скомпонованы с последовательными портами для gps/модули компаса.Набор для разработки Pixhawk 4 autopilot идеально подходит для разработчиков в лабораториях, стартапах, а также для учёных (исследований, профессоров, студентов).Параметры:Система управления полетомОсновной процессор FMU: STM32F765 32 бит Arm Cortex-M7, 216 МГц, 2 Мб памяти, 512кб ramIO Процессор: STM32F100 32 бит Arm Cortex-M3, 24 МГц, 8КБ SRAMAccel/Gyro: ICM-20689Accel/гироскоп: BMI055Mag: IST8310Барометр: MS5611Размеры: 44x84x12 ммВес: пластиковый чехол: 33gЧехол из алюминия: 44gМощность Управление доскаПроизводитель: HolyBroМодель: PM07Название позиции: Плата управления питанием PM с 5 В BEC для контроллера полета Pixhawk 4Выход UBEC: 5 В @ 3AUBEC Входное напряжение: 7-15 в (2-12 с)Размер: 68x50x8 ммМонтажное отверстие: 45x45 ммВес: 36 гИнтерфейсы8-16 ШИМ сервовыходов (8 от IO, 8 от FMU)3 выделенных PWM/захвата на FMUВыделенный вход R/C для CPPMВыделенный вход R/C для Spektrum/DSM и S. Bus с аналоговым/ШИМ RSSI входомСпециальный сервопривод S. Bus5 последовательных портов общего назначения, 2 2 с управлением потоком flil, 1 с раздельным ограничением тока 1.5A3 I2C порты4 шинам SPIДо 2 CANBus для двойной CAN с последовательным ESC, каждый CANBus имеет индивидуальные бесшумные элементы управления или ESC RX-MUX управленияАналоговые входы для напряжения/тока 2 батарей2 дополнительных аналоговые входные сигналыМощность модуля: 4,9 ~ 5,5 ВМаксимальное входное напряжение: 6 ВМаксимальный ток чувствительности: 120AВход питания USB: 4,75 ~ 5,25 вВход сервопривода: 0 ~ 36 VРаботая temp. ~ 40 ~ 85CТемпература хранения. -40 ~ 85CCEFCC, аддитивного цветового пространстваСоответствует RoHS (без свинца)Посылка включает в себя:Пластик чехол версия1 x Pixhawk4 с Пластик чехолПлата управления питанием Pixhawk 4-1 шт.1 x разветвитель IEC3x6-6 pin кабель (питание)2x4-4 pin кабеля (CAN)1x6-4 pin кабель (для передачи данных)2x10-10 pin кабеля (ШИМ)1x8 до 8-ми штифтовый кабель (AUX)1 х PPM/SBUS out кабель1 х кабель приемника XSR1 x Приемник DSMX кабель1 х кабель приемника SBUSUSB кабель (1 шт.);1x6*3 2,54 мм Шаг горизонтальный штифт1x8*3 2,54 мм Шаг горизонтальный штырь1 x набор пены1 x Руководство по быстрому запуску Pixhawk41 х плата управления питанием Руководство по быстрому запуску




Характеристики
- Материал
- Комбинированный материал
- Технические характеристики
- Значение 2
- Колесная база
- Нижняя пластина
- Габаритные размеры
- 44x84x12mm
- Номер модели
- Holybro Pixhawk 4 Flight Controller
- Тип транспорта
- Вертолеты
- Расходный материал для инструментов
- Тип сборки
- Периферийные устройства для дистанционного управления
- ESC
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Детали для тюнинга и запчасти
- Переходник
- Характеристики
- Сборка
- Детали дистанционного управления и комплектующие
- Регуляторы скорости
Сопутствующие товары








